The 29th IEEEInternational Conference on Mechatronics and Machine Vision in Practice (M2VIP2023) was held in Queenstown, New Zealand, from November 21 to 24. Theconference was jointly organized by the University of Auckland, the Universityof Leeds, and Massey University. It provided an interdisciplinary internationalforum focusing on mechatronics and machine vision.
The conferencethemes covered cutting-edge technologies in areas such as robotics, intelligentsensors, artificial intelligence, machine vision, and mechatronic systems formedical rehabilitation. Having been successfully held 29 times, the M2VIP InternationalConference has established itself as a highly influential platform in thefields of artificial intelligence, mechatronics, machine vision, and robotics.Papers from the conference are indexed in IEEE Xplore, EI Compendex, and othermajor academic databases.
This year’s conference featured the Best ConferencePaper Award, which was evaluated and awarded by the conference committee basedon the quality of the paper and the presentation during the conference, withrecipients receiving an official certificate.
The IntelligentCollaborative Robotics Research Team from the School of Mechanical andAutomotive Engineering at Shanghai University of Engineering Science won theBest Paper Award for their paper titled “Designand Research of a Manipulator with Variable Stiffness and Multi-directionalGripping.” The first authorof the paper is master’sstudent Wan Renyu, under the supervision of Zhu Zina and Chen Saixuan, amongothers.


[Paper Summary]
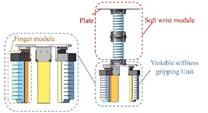
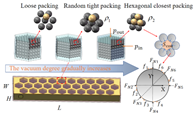
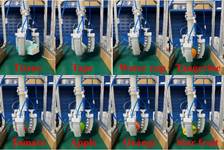
Compared to rigidgrippers, soft grippers are more flexible, safe, and adaptive, offering broadapplication prospects in fields such as healthcare, service industries, andfood handling. This paper introduces a novel granular jamming-based variablestiffness structure. By using a honeycomb grid support structure to divide thejamming granules into multiple regions, the design effectively reduces shapeinstability caused by granular reorganization during finger bending.
The proposedgripper achieves both flexible contact and rigid gripping. Additionally, it incorporatesa dual-section flexible wrist mechanism, mimicking arm-like functionality,which enables multi-directional gripping in space.
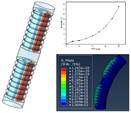
Experimentalresults demonstrate that the gripper can handle objects of various shapes andweights. Under a jamming pressure of -50 kPa, the stiffness in the jammed statereaches 9.8 times that of its natural state. When driven at 30 kPa and with ajamming pressure of -30 kPa, the gripper can lift objects weighing up to 315grams. These findings indicate that the gripper exhibits excellent variablestiffness performance and is well-suited for applications such as handlingeveryday fruits, vegetables, and food items.